Quando precisamos detectar obstáculos em nossos projeto temos algumas opções disponíveis. No mercado temos disponíveis sensores capazes de captar um obstáculo com tecnologias como laser, infravermelho ou ondas ultrassônicas.
Apesar dos diversos modelos é comum em projetos mais simples ou amadores nos depararmos com o sensor ultrassônico, ou sonar, HC-SR04. Este é um sensor de baixo custo muito fácil de encontrar no mercado principalmente em lojas especializadas em projetos com Arduino.
A Figura 1 apresenta o sonar HC-SR04. Podemos verificar que se trata de um módulo com 4 pinos (VCC, Trigger, Echo e GND) onde temos dois transdutores, sendo um para enviar o sinal ultrassônico e outro para captar o retorno.
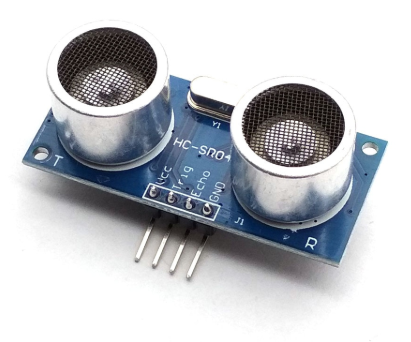
Fonte: https://pt.aliexpress.com/item/32939762416.html